零念科技创始人兼CEO柯柱良接受焉知汽车专访



共建高安全可靠的中间件产品
上海零念科技有限公司(LinearX)是一家成立于2021年的初创企业,相比其它从事智能驾驶基础软件平台的公司,其进入的时间并不早,况且还面临着国内外激烈的竞争环境。那么,零念科技成立的初衷是什么?这家公司产品和技术的竞争力又如何?近日,带着众多的疑问,焉知汽车专访了零念科技的创始人兼CEO柯柱良先生,并进行了深入的交流。以下为原文内容:

零念科技创始人兼CEO柯柱良
全球第一款L3级自动驾驶域控制器的见证者
柯柱良本科毕业于西安电子科技大学的通信工程专业,并在德国亚琛工业大学获得计算机硕士学位。毕业后,他曾在华为、德国大众、TTTech等多家企业任职,在此期间,参与主导了奥迪zFAS全球第一款L3级自动驾驶域控的开发工作。2018年,他外派回国后就职于上汽创时智驾,并担任平台软件技术负责人,负责上汽荣威、上汽智己等多个智能驾驶项目。2021年,他创立零念科技并担任CEO。
其中,全球第一款L3级自动驾驶域控的研发经历让他一直引以为豪。奥迪zFAS先人一步只是一方面,更重要的意义在于它第一次真正实现了L3级自动驾驶的量产落地,难度之大可想而知。"我有幸参与了这样一个具有开创性的大型项目,亲身经历了复杂型系统的构建,并验证了它的可靠性、安全性。其中,很多系统逻辑和方法论对我们今天的工作依然有很强的借鉴和指导意义。"柯柱良表示。
谈到项目本身,他感慨颇多:"整个项目过程中踩过的坑很多。其中一个,是做泊车超声波雷达系统的时候,系统单独运行的时候,工作很稳定。但是,再集成进去一些其它软件的时候,由于受到其它系统的影响,超声波雷达的性能出现急剧下降。经过多次试错和磨合,才最终发现并解决了问题。当很多功能要集成到一个域控制器的时候,系统的复杂性大大增强,解决各个系统之间的相互干扰就是一项很大的挑战。"
其中,供应商的管理也是一个很棘手的问题。当时,奥迪的zFAS可以称得上是行泊一体方案的"鼻祖"了。但是,当时芯片的性能远没有现在这么强,一款智能驾驶域控要拼凑多达4~5颗SoC/MCU芯片,奥迪的zFAS域控制器采用的主控芯片有:英伟达的Tegra K1 VCM、Mobileye的EyeQ3、Altera的Cyclone V以及英飞凌的Aurix TC297T等。因此,这个项目必然需要调动多家供应商一起来做,管理难度可想而知。
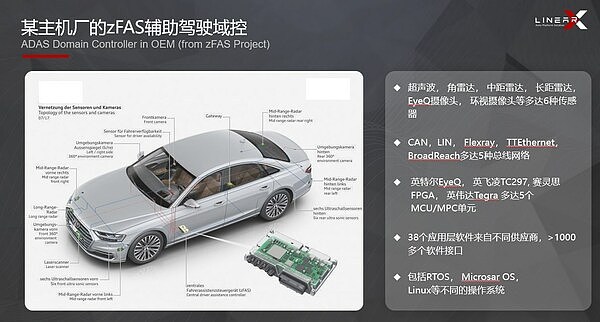
某主机厂zFAS域控制器
"当时,这个项目有超过1000多个软件接口,并且,38个应用层软件来自不同的供应商。如何划分不同供应商之间的界限,对系统设计而言是一项很大的挑战。那个时期,各家芯片的算力还非常有限,但系统要实现的功能却和现在差不多,所以,我们后期花了很长的时间不断地去做系统优化。"柯柱良介绍说。
EE架构演进驱动底层软件的变革
整车EE架构的演进驱动了汽车底层OS的变革。在分布式架构阶段,操作系统还是采用Classis AUTOSAR(CP),CP引入了RTE标准中间通信模型和标准BSW,主要应用于高性能MCU;到了集中式域控架构阶段,Classis AUTOSAR(CP)升级为Adaptive AUTOSAR(AP),AP引入了面向服务的架构(SOA),以及对POSIX系统的支持,主要应用于高算力SoC;未来的中央计算架构也许将出现新的底层操作系统。在EE架构的不同阶段,智能驾驶系统对底层基础软件的需求存在较大的不同。
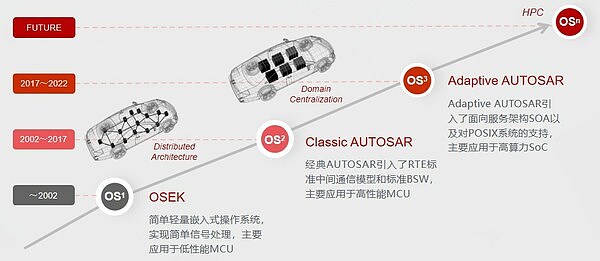
EE架构的演进驱动了汽车底层OS的变革
在柯柱良看来,CP出现后 ,才有了明确的中间件概念。CP的一个重要使命就是实现标准的软件接口,实现软硬件解耦,便于不同供应商的产品能够相互兼容。而AP有两个使命,一是支持SoC,二是实现SOA的软件架构。
未来将是多个CP/AP混杂的多芯片复杂的异构架构。对中间件来说,最重要的是实现跨域系统的抽象。一个比较理想的中间件就是要实现软硬件完全解耦,对于上层应用而言,它不需要知道服务从哪里来,服务对象是SoC还是MCU,通过中间件进行服务的调用即可。
共建高安全可靠的汽车操作系统
业界认为,特斯拉没有使用AUTOSAR AP,国内的几家主要造车新势力也没有用,大部分采用的是AUTOSAR CP+DDS的形式。甚至,一些正在转型的传统车企也没有太大的意向去用AUTOSAR AP。原因可能有以下几种:1)使用成本高;2)效率不高;3)AUTOSAR只负责车内通信,不支持车云通信,无法支持车路协同场景。
不过,也有人认为,AUTOSAR AP只会越来越重要,因为它是顺应车载技术,并不断发展的规范,覆盖面会越来越广。在未来,没有AUTOSAR AP的支持,多域融合的中央计算架构很难被搞定。
柯柱良表示,特斯拉之所以没有使用 AUTOSAR AP,采用自己搞的一套系统,是因为特斯拉是基于互联网的思维去造车。如果其它家也都像特斯拉一样,具备全栈自研的能力,那么,就可以无需适配别人需求,自己玩就好。所以,特斯拉的做法完全可以理解,类似于苹自己做手机底层软件的思路。
也许,市场上会出现一两家类似特斯拉的造车公司,但大部分企业还是需要围绕AUTOSAR生态去做事情。AUTOSAR AP提供了一套国际化、标准化的能力,支持企业之间的软硬件解耦。企业之间需要考虑的是如何互相兼容、互联互通和开放。
"AUTOSAR AP的主要优势就在于它是一个国际化的标准,是一个生态体系,只有符合这个生态的产品才有很强的生命力。多域融合的中央计算架构更为复杂,如果没有一套统一的标准,各个域相互之间就无法真正融合,所以未来AUTOSAR AP将成为主流,像安卓一样成为一个大生态。多数企业都是需要加入到这个生态中,大家一起共同成长。"柯柱良认为。
零念科技定位于量产
零念科技从成立之初,整个产品规划的定位就是要做一个可落地、可量产的方案,从L2再到L3,通过不断地迭代和升维,解决智能驾驶或EE架构的安全性问题,切实帮助车企解决痛点问题。柯柱良直言:"我们做产品从一开始就是奔着量产去的。从公司使命:科技赋能客户,领航安全出行,就可以反映出来。"
"这两句话包含两层意思:其一,不管是做产品还是工程,零念科技都希望给客户赋能,让客户有更强的能力掌握中间件和底层软件开发;其二,零念科技的产品定位是高安全,旨在弥补智能汽车操作系统当前安全性方面的缺失。"他解释道。
"另外,我们的团队具备很强的整体系统落地的工程化能力,能够让软件在资源有限的嵌入式处理器中跑得好、跑得稳。因为团队中有很多同事曾在博世、大陆等国际Tier1或上汽创时智驾等企业任职,拥有整车或域控软件部署方面的丰富开发经验和较强的工作能力。"柯柱良自豪地介绍说。
零念科技的产品与工具链
零念科技的主要产品包括:确定性通信产品PowerD-Comm、确定性调度产品PowerD-Sched和安全服务包SafetyOSS;提供的主要服务有:1)嵌入式系统定制 —— 基于Classic AUTOSAR对MCU/SoC安全岛进行嵌入式系统定制;2)芯片级安全驱动 —— 为SoC芯片定制安全驱动MCAL和底层安全策略;3)TSN和时间同步 —— 为TSN芯片提供精确的QoS配置和控制并实现时间同步。
那么,零念科技分别为嵌入式系统和高算力SoC提供的解决方案和定制化的开发服务有何不同呢?
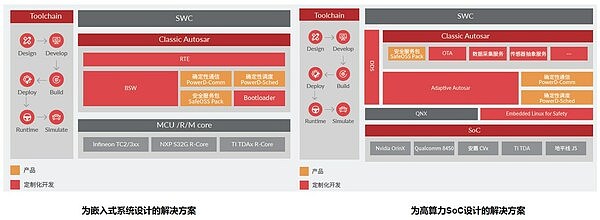
分别针对MCU和SoC的解决方案
柯柱良回应道,不管是现在还是未来,PowerD-Comm和PowerD-Sched都支持CP和AP平台,只是产品真正部署进去时,可能部分代码会有相应调整。
关于定制化开发,在CP端,会采用一些比较成熟的CP产品,零念科技在此基础上为客户提供定制化服务;在AP端,零念科技的自主可控能力更强一些,不管是AP平台还是底层协议栈,都可以根据客户需求进行定制化开发。
从市场来看,目前CP处于一个比较稳定的状态,各家做得都差不多;AP则处在一个不断"变"的过程中,还处于逐渐被接受的过程,没有达到稳定的状态,大家都处在一个摸索阶段。因此,在AP端,客户定制化合作的点会更多一些。总体而言,零念科技的产品可以解决跨域通信、调度准确性等痛点问题。
1)确定性通信中间件PowerD-Comm
所谓确定性通信中间件PowerD-Comm的主要定位是用于传输关键性信号,比如车身XYZ三轴信号。从原理上看,它是软硬件一体的解决方案,除了软件,还会利用TSN或TTE等硬件交换芯片,基于时间片分时传输理论构建数据的虚拟传输通道, 可以解决数据流相互干扰和并发传输(Boost)下带来的传输不稳定,延时丢包等问题。实现不同芯片或控制器之间信号的可靠传输。
"PowerD-Comm的第一个应用场景是整车以太网化,因为它不会直接和SOA通信竞争,而是可以取代CAN总线的部分工作,以大幅降低整车总线的使用成本。另外,PowerD-Comm还有另一个应用场景,即支持当前的EE架构无缝过渡到SOA架构。因为它能够同时支持CP的RTE接口和AP的aracom接口, 并且提供了信号到服务(S2S)的映射功能。也就说,支持在SoC上部署一套类似MCU的环境,可将之前部署在MCU上的算法无缝移植到SoC上。"柯柱良介绍说。
2)确定性调度中间件PowerD-Sch
PowerD-Sch确定性调度中间件通过时间触发调度(TIMER_TRIGGER)、事件触发调度(EVENT_TRIGER)、数据触发调度(DATA_TRIGGER)机制可保证用户的应用确定性的执行。
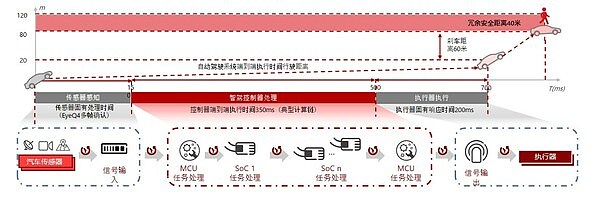
时间触发调度 - 通过时间确定性确保系统的安全
PowerD-Sch确定性调度的主要任务则是对智能驾驶系统的复杂任务进行编排,保证各项任务的顺利执行,避免系统资源无序抢夺、重入等问题,进而造成系统资源浪费,效率低下。如果没有调度器,部署后会发现相互之间会抢占资源,导致有些任务根本无法按照设想执行,甚至会造成系统性锁死、崩溃等现象。
"总体而言,确定性调度解决的问题就像用木桶装水。如果路不好走,水很晃的话,就需要很大的木桶去装水,才能确保水不会洒出来。但问题也就来了,在域控制器中,用'大桶'意味着成本就会高,就好比原来只要30TOPS算力就能解决的问题,现在可能要用70或80TOPS的大算力SoC才行。
通过确定性调度,给所有任务进行合理编排,让其有序执行,使'水'不再晃,SoC的算力资源就可以得到充分利用。那么,在这种情况下,就相当于可以用更小的'木桶'—— 合适的小算力资源的SoC把整个系统顺利跑起来。"柯柱良形象地解释说。
3)LinearX CarOS工具链
零念科技定位于汽车领域的软件供应商,具有自主知识产权的底层和中间件软件技术,构建底层数据与应用平台之间高可靠、高安全、高实时的互联互通,形成了以工具链自动化生成"底层软件+中间件+应用层服务"的产品形式。
柯柱良解释说,首先,零念科技的LinearX CarOS工具链是一套非常友好的图形化设计工具,对工程师能力的要求降低了很多,不需要写代码,只要经过培训,就能掌握我们工具链产品的定制化配置能力。
其次,这些工具链可以自动生成配置,不需要做过多的代码二次开发,甚至可以零代码生成新的产品配置;
最后,一些监控软件能够快速定位到之前设计的偏差。
关于工具链自动化生成"底层软件+中间件+应用层服务"的产品形式,他表示,目前零念科技提供给客户的定制化产品很多都是通过工具链实现的,例如客户要定义一些应用层接口,只需在工具链上操作建模,把想要的接口模型建好,就可以自动化生成全部代码。甚至一些中间件软件模块也可以通过工具链来配置,比如,需要支持几个调度模块,都可以通过图形化界面生成,然后生成代码,再通过一体化CI/CD方式部署所有的代码,集成编译后自动放到流水线中。
术业有专攻,深耕自己擅长的领域
事实上,现在很多做域控的Tier1自己也在做中间件,这对专门做中间件的企业来讲,是不是会带来一定的冲击呢?
对此,有业内人士直言不讳的表示,目前域控Tier1做中间件是可以理解的。不过,总体上来看,国内行业内卷太严重,甚至有一些企业在做一些自己不太擅长的事情,导致行业处于鱼龙混杂的状态。
从目前情况来看,其中有一些做中间件的公司还缺乏一定的专业性,比如,有些企业中间件的Base是用开源方案,甚至是用ROS方案,这样的方案可能仅限于做一个Demo,要想真正量产,还要做功能安全的验证,这些开源方案很难做到量产。
柯柱良认为,有些厂家的中间件过于定制化,只能适配自己的板子。对主机厂来说,他们更希望有一套支持广泛的中间件方案,而不只是单独适配某一套硬件,不然就又回到了软硬件一体的老路。从商业逻辑上说,主机厂肯定希望中间件能够实现充分的软硬件解耦,而且解耦越彻底越好,这样可控性才会更强。
在行业发展初期,还没有特别好的产品出现之前,可能大家都想自己尝试去做一做。但是,随着行业逐渐成熟,最终还是会趋向于专业分工,大家各自去做自己比较擅长的事情。
"零念科技专注智能驾驶平台软件,致力于持续不断地提升自己的"软实力",为智能汽车和智能驾驶提供完全自主可控的操作系统,以及高度可扩展的安全基础软件平台和定制化的解决方案。"柯柱良最后总结说道。
来源:金色财经

